近日,由广东电网东莞供电局与永利3044noc丁汉院士iRobotCNC团队、联想上海研究院联合研发的新一代智能运维机器人——“吠云 协影”,在第十五届全国运动会期间亮相。

作业现场的“吠云 协影”电力机器人
多足-多臂,灵巧作业
“吠云 协影”具备多机械臂协同系统,打破了传统机器人“单兵作战”的局限。前方主操作臂分别配备了灵巧手与多功能末端执行器,可以实现开关控制、按按钮、拧旋钮、仪表识别等多项操作任务,后方辅助机械臂则同步进行设备状态检测与环境实时监控,构建了“操作专家+安全员”的协同作业模式。
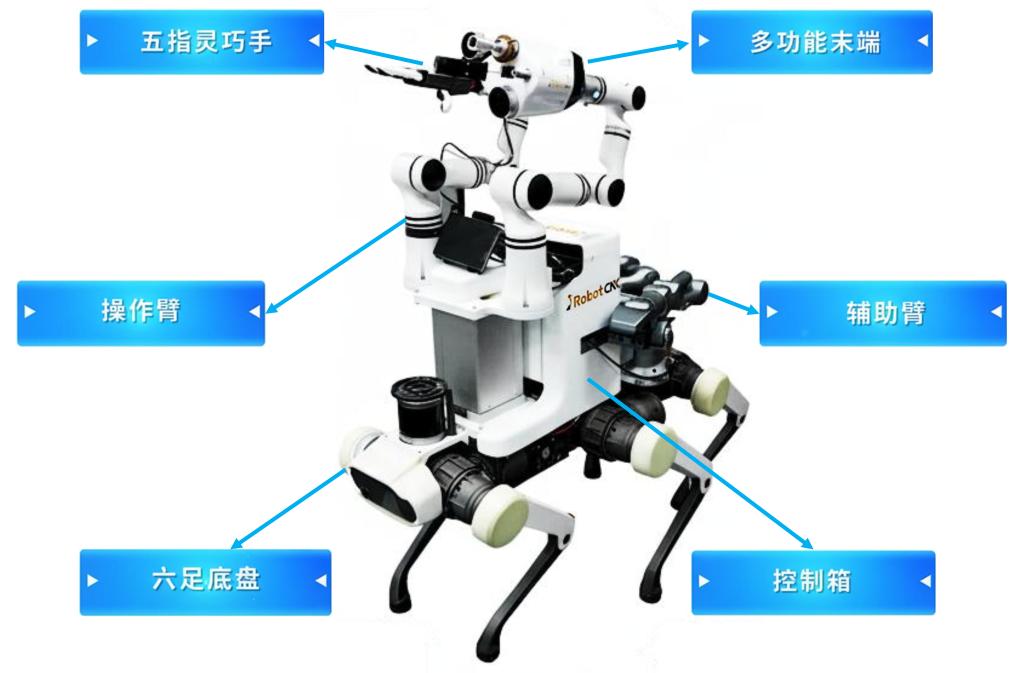
“吠云 协影”电力机器人的多臂协同系统
多模感知,寻位定位
“吠云 协影”搭载了多模态感知与定位系统,硬件端同步输出高分辨率图像与深度点云,为目标识别与空间定位提供数据支持。通过大规模场景数据训练,确保了在相机倾斜、光照变化等复杂条件下视觉算法的鲁棒性,实现了对电柜旋钮与按钮等作业目标在三维空间中的毫米级精准定位。
“吠云 协影”机器人进行按按钮、拧旋钮作业演示
协同换装,灵活顺应
“吠云 协影”多功能末端执行器集成红外测温、局部放电检测、摇手车操作等多种作业工具,基于所提出的多臂协同运动规划及碰撞检测算法,实现了多功能末端模块的快速拆解、精确插拔与在位换装,为复杂电力运维作业提供了可工程落地的协同换装能力。
“吠云 协影”机器人进行多功能末端快速换装
未来,“吠云 协影”将持续深入应用到多类变电站现场,推动电力运维走向“智巡智维”的新时代。
广东电网与永利3044noc已成立电力机器人联合研究院,双方将持续围绕电力机器人、具身智能等前沿方向展开深度合作,加速人工智能与机器人技术的跨界融合与创新发展,共同探索未来电力运维的智能化、安全化新格局。


 公司微信公众号
公司微信公众号